

『食感を科学する-咀嚼シミュレーターの開発』前編─東森教授に聞く、咀嚼の可視化
- 公開日:
食品のおいしさに欠かせない「食感」。しかし、食感はヒトの感覚に依存するため、食感の定量評価は難しい課題です。今回ご紹介するのは、この難題に挑んだ大阪大学大学院工学研究科の東森充教授研究室と当社による咀嚼シミュレーターの開発プロジェクトです。ヒトの咀嚼を再現することで、食感を科学的に評価する新たなアプローチが始まっています。
ヒトは、喫食時に食感や風味などの様々な要素を時系列的かつ複雑に統合し、食品の性質を総合的に判断して、「おいしさ」を感じます。
中でも大きく影響を与えるのが、「フレーバー(味や香りなどの化学的性質)」および「テクスチャー(食感などの物理的性質)」です。特にテクスチャーは、ポテトチップスの“パリパリ感”、パンの“ふんわり感”、プリンの“なめらかさ”など様々な特徴があり、食べる楽しさや食の満足感を左右する重要な要素です。
食品開発では、原材料や調理法の工夫により「おいしさ」の設計が進められており、香味油や調理香によるフレーバー制御、食感改良剤や加熱条件によるテクスチャー制御の研究が活発に行われています。特にテクスチャーは技術的な進展が求められる分野であり、“硬さ”においても硬度・弾力・崩壊性などが複雑に関与し、咀嚼中の食感の変化がフレーバーに影響することも報告されています。
こうした食感を定量的に把握・数値化することは、商品開発や品質安定化への貢献はもちろん、トレンド食感の再現や新しい食感の創出など、食品メーカーだけでなく生活者にとっても大きな価値をもたらすと考えています。
しかし、食感の定量化は容易ではありません。食感には物理的な“硬さ”や“弾力”だけでなく、“口どけ”“サクとろ”といった、口腔内での食品の時系列的変化を複雑に感じるものもあります。これらはヒトの咀嚼動作による食品の時系列変化と、そこでの知覚を捉えることが必要になるため、評価が難しいのです。
咀嚼シミュレーター開発の着手
従来の食感評価には、官能評価や力学分析が用いられてきました。いずれの評価も一般的ですが、評価可能な食感に制限があったり、評価環境整備などの課題がありました。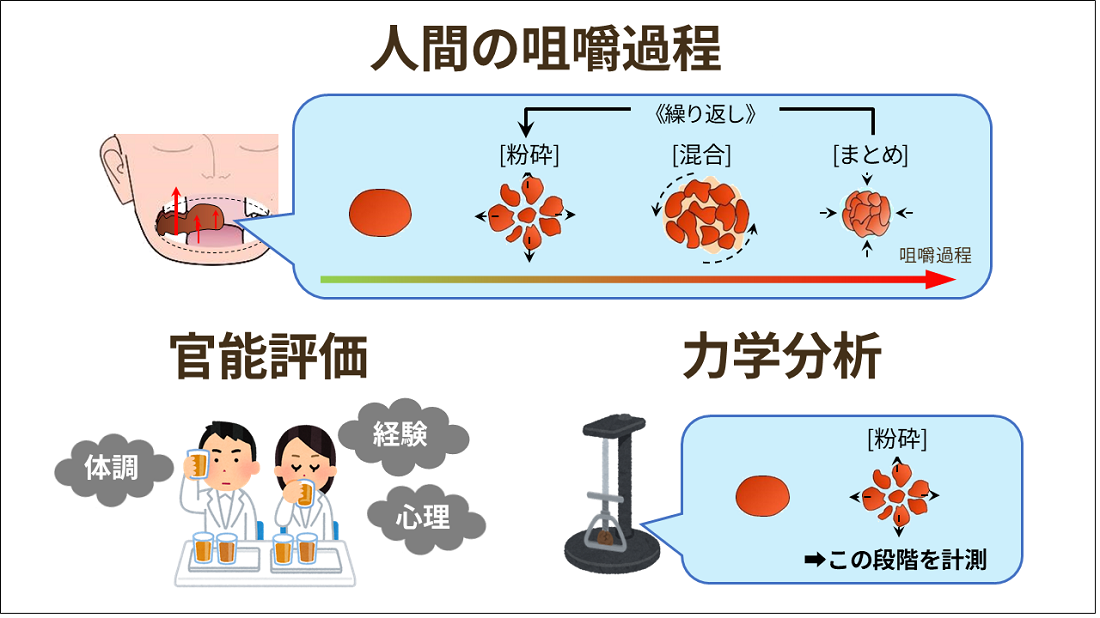 官能評価は、ヒトの知覚機能を用いるので、食感や風味などの複雑な特性の評価に有効です。一方で、評価者の体調や経験、心理状態によって結果が左右される可能性があり、安定した評価を得るには評価者の育成や環境整備が必要となるため、相応の時間とコストを要します。
官能評価は、ヒトの知覚機能を用いるので、食感や風味などの複雑な特性の評価に有効です。一方で、評価者の体調や経験、心理状態によって結果が左右される可能性があり、安定した評価を得るには評価者の育成や環境整備が必要となるため、相応の時間とコストを要します。
力学分析では、テクスチャーアナライザーで力学的に圧縮して評価するTPA法(テクスチャープロファイル分析)や粘度計での粘度測定などが一般的です。これらは“硬さ”や“弾力”などの物理的な特性を測定できますが、再現されるのは咀嚼の2回目程度までとなり、官能評価との対応が得られない場合もあります。硬度・弾力・崩壊性などが複雑に関与した“硬さ”の計測や、咀嚼中~後期の食感の変化などは捉えきれません。
つまり、ヒトの複雑な感覚を評価するには、食品の単純な物性だけでなく、口腔内での時系列的な変化を再現できる評価手法が必要と考えられます。
この課題に挑むべく、当社は2018年より大阪大学大学院工学研究科 東森充教授研究室との共同研究を開始しました。本プロジェクトでは、従来の物性評価では再現できなかった咀嚼中~後期を含めたヒトの咀嚼過程を再現する装置「咀嚼シミュレーター」の開発に取り組んできました。
世界初!咀嚼ロボットを開発 ヒトの咀嚼の仕組みを再現し、食品の評価に活用 大阪大学大学院工学研究科との共同研究が学術誌「日本機械学会学術誌」に掲載|プレスルーム|JOYL – J-オイルミルズ
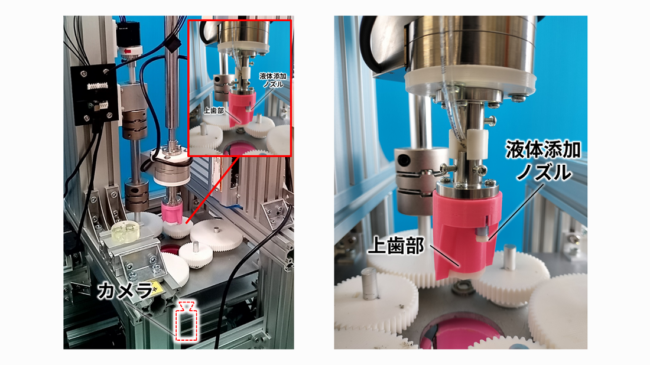
本プロジェクトの研究においては、ヒトの咀嚼動作を、歯や舌を用いた食品の[粉砕]/断片群と唾液の[混合]/断片群の[まとめ]の3要素に、唾液などを加える[添加]を追加した4要素により構成されると定義しました。そして、この[まとめ]機構を搭載した咀嚼シミュレーターを開発、2025年には液体添加の新機能を新たに追加し、ヒトの咀嚼の再現性を向上しています。
咀嚼シミュレーターでは、食品粉砕時の上歯部にかかる咬合力を計測するとともに、下部から食品断片の状態を録画することで、咀嚼過程の経時変化を評価することができます。この咀嚼過程の食品変化は食感とも密接に関係しており、食感の数値化が可能になると考えられます。
では、この咀嚼シミュレーターはどのような発想から生まれ、どのような技術的工夫が凝らされているのでしょうか。開発のきっかけや苦労された点について、東森教授と当社研究員に振り返っていただきました。
開発陣(東森教授と当社研究員)に聞く、咀嚼シミュレーター開発の背景
Q. 咀嚼シミュレーターはどのような目的で開始されたのですか?
東森教授)
端的に言いますと、ヒトの咀嚼過程の再現を目的として開発したものです。ただし、ここで言う咀嚼とは、単に歯で食品を“噛む”ことではありません。歯、舌、口蓋、頬を用いて、“食品を粉砕し、唾液と混ぜ合わせ、それらをまとめ、柔らかく飲み込みやすい塊を作り上げていく”ことです。このような塊を食塊、食塊を作ることを食塊形成と言いますが、本シミュレーターでは、食塊形成の一連のプロセスを再現することを目指したということです。
研究員H)
当社は、新たな食品評価技術の開発を目的に共同研究を開始しました。
通常の食品評価法では、主に喫食初期における食品の変化を捉えていると考えられます。一方、本シミュレーターでは、咀嚼や食塊形成といった嚥下直前までのプロセスを評価対象とすることで、これまで評価が難しかった領域にアプローチできると考えています。本シミュレーターを活用することで、より良い「おいしさ」の提供につながると期待しています。
Q. この研究を始められたきっかけや、着想の源は何だったのでしょうか?
東森教授)
私のそもそもの専門分野は機械工学であり、その中でもロボットハンド、すなわち「手を使った物体の操作」に関する研究分野です。10年ほど前、歯学系の先生に、ヒトの咀嚼過程の口腔内の様子を捉えたX線動画を見せていただく機会がありました。その際に、咀嚼とは「歯や舌を使って食品を壊す操作だな」とか「手に勝るとも劣らない巧みな操作だな」と意識したのが本研究のきっかけです。考えてみると、私たちは日頃、咀嚼という複雑な食品操作を無意識に行っています。同時に、食感や味、香りを敏感に感知しています。このような複雑なヒトの咀嚼メカニズムを機械工学の視座から理解、再現してみたいと想い、現在に至っています。
Q. 開発にあたって、特に苦労された点は?
東森教授)
私たちは、咀嚼を構成する4つの基本要素として、食品の[粉砕]、唾液の[添加]、断片と唾液の[混合]、断片群の[まとめ]を定義し、これらを実行するための機構と動作の設計に取り組みました。
このうち、[粉砕][添加][混合]は既存の咀嚼装置でも実現されており、機構や動作も比較的シンプルです。一方で、[まとめ]は、ヒトが頬をすぼめたり、舌を曲げたりして、散らばった断片を集めてまとめる機能に相当します。歯の上に断片を置き直したり、飲み込む前の食塊を作ったりする重要な機能です。このような[まとめ]のための機構と動作は、それ単体でも設計が難しかったのですが、[粉砕][添加][混合]のための機構と同居しつつ、それらの動作とも齟齬無く繋がるよう、一つの装置として設計することは本当に大変でした。苦労の末シミュレーター機能を実現できたことで、唯一無二の咀嚼シミュレーターができあがりました。
研究員H)
当社ではこれまで、テクスチャーアナライザー(本シミュレーターの[粉砕]機能に近い機構を持つ装置)による力覚分析を行い、そのデータと食感の関連付けを行ってきました。しかし、ヒトの咀嚼メカニズムは非常に複雑であり、力覚分析だけでは説明が難しい部分も多く存在します。本シミュレーターの開発によって測定可能な情報が大幅に広がり、評価技術の発展につながる可能性を感じました。その一方で、得られたデータの解釈には苦労もありましたが、官能評価と対応関係が確認できたことで、シミュレーターの可能性が大きく広がったと考えています。
次回(後編)では、本装置を用いた測定事例をご紹介しますので、ぜひご覧ください。
次回は、この咀嚼シミュレーターを実際の食品評価に活用した事例についてご紹介します。咀嚼シミュレーターによる食品の経時的変化の再現、および定量評価の結果について、ぜひご覧ください!